
速腾聚创的机器人之眼革命:终结「重复造轮子」难题
作者 | 本一
编辑 | 德新
在科技圈,我们总是痴迷于讨论"大脑"——更强的算力,更聪明的算法,更具泛化能力的模型。对机器人行业而言,这意味着对"具身智能"的无限遐想。
但我们往往忽略了一个更基础、也更令人头疼的问题:在拥有一个聪明的"大脑"之前,机器人首先需要一双可靠的"眼睛"。
而恰恰是打造这双"眼睛"的过程,正在让整个行业陷入"重复造轮子"的巨大内耗之中。
一、隐性内耗:行业进步的"拦路虎"
这种内耗是隐性的,它藏在每家机器人公司的财务报表和项目进度里。
工程师们花费着巨量的时间和精力,试图将一堆来自不同厂商的摄像头、激光雷达和惯性测量单元(IMU)攒在一起。他们要处理复杂的硬件安装、电源管理、数据同步、外参标定,以及最可怕的——试图在软件层面,将不同传感器采集到的时空都不同步的数据进行融合。
这有多难?打个比喻,这好比你要把三个以各自节拍演奏的独立"乐手",同步成一首和谐的"交响曲"。
但这个基础工作却又是任何应用级开发的先决条件。这就导致它占用了开发者宝贵的时间和资本,使其无法投入到机器人自身的核心价值创造中。这种"重复造轮子"的模式不仅成本高昂、效率低下,更导致了感知方案的碎片化,难以规模化复制和迭代。
这种"内耗"已经成了行业进步的巨大障碍,拖累了创新的步伐,尤其是对那些缺乏资源、需要从头解决这些复杂系统集成问题的小型企业和初创公司。
行业需要一个破局者。不是提供一个更好的独立"乐器",而是提供一个自带指挥、拥有完整建制的"交响乐团"。

二、速腾聚创,用Active Camera打破行业痛点
这正是速腾聚创(RoboSense)带着机器人视觉全新品类—— Active Camera 登场时,试图告诉大家的故事。
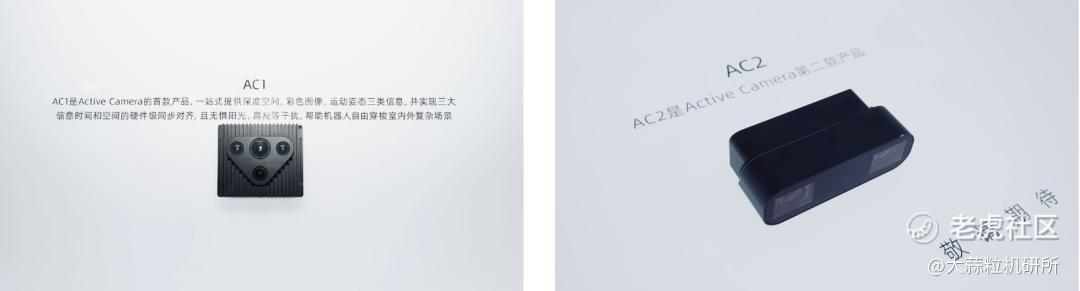
在8月8日开幕的世界机器人大会(WRC)上,速腾聚创以"真正的机器人之眼"为主题,不仅展出了已发布的 Active Camera 平台首款产品 AC1 及 AI-Ready 生态,还亮相了全新产品 AC2,预计于下半年正式发布。
Active Camera 平台,不仅是一款新传感器,更是一个全新机器人感知品类。
它的目标是从根本上为开发者移除感知堆栈开发的高昂准入门槛,为通用机器人时代的加速到来,提供一个标准化的关键"视觉中枢"。
三、重新定义"机器人之眼"
要理解 Active Camera 的革命性,首先要明白为何传统的解决方案并不能称之为"真正的机器人之眼"。
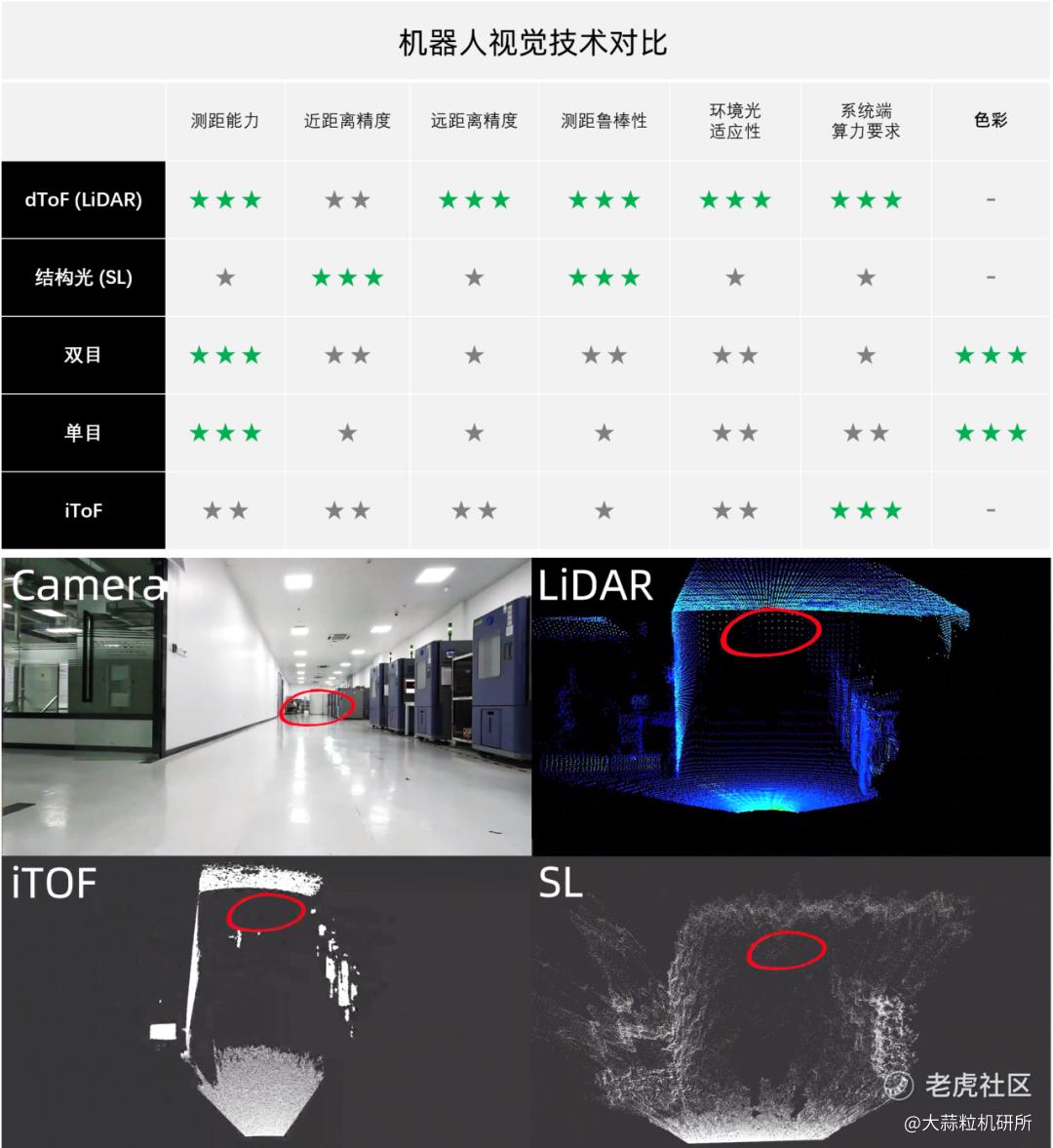
传统方案中,一个简单的相机提供 2D 色彩信息,一个激光雷达 LiDAR 提供 3D 点云数据,一个 IMU 提供运动姿态。它们是孤立的、被动的数据采集单元,就像离散的感官碎片。将这些碎片在软件层面缝合成一幅连贯的世界图景,不仅延迟高、不可靠,更会在复杂环境下(如强光、透明或深色物体)暴露出各自的短板,导致机器人"失明"或"误判"。
Active Camera 则彻底颠覆了「传感器」这一传统概念。它并非被动地将几个传感器集成在一起,而是一个具备主动探测、深度集成能力的感知"器官"。
它的核心价值在于"化繁为简",将人类视觉系统与前庭系统(感知运动与平衡)协同工作的模式,在硬件层面进行了工程复现。
机器人如何更聪明地“看懂”世界?
以首款产品 AC1 为例,它通过单一硬件同时提供3类对机器人至关重要的信息:
-
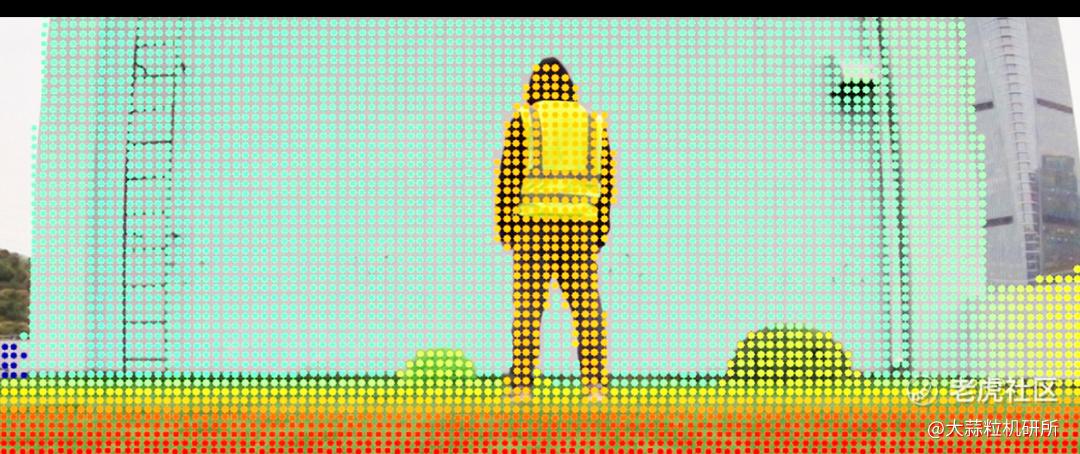
高分辨率的色彩信息:由 RGB 相机提供,回答"它是什么?"的语义问题;
-
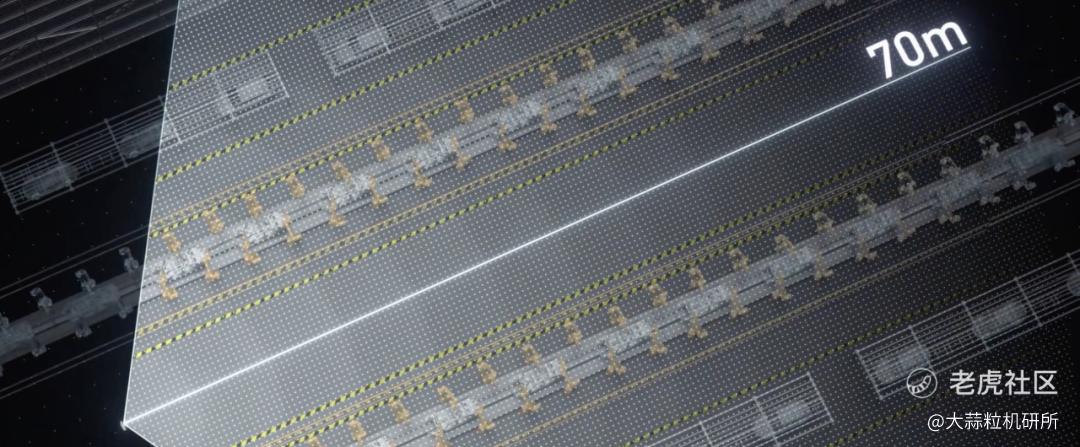
高精度、高鲁棒性的深度信息:由主动式 ToF LiDAR 提供,回答"它在哪里?"的几何问题;
-
高频的运动状态信息:由 6 轴 IMU 提供,回答"我相对于它如何移动?"的自我运动姿态问题;
这听起来似乎只是简单的"三合一",但真正奇妙的地方发生在内部。

Active Camera 创新的核心在于硬件级的时空融合。它并不只是对感知数据进行简单的软件后处理,而是从硬件架构层面对机器人感知元件进行了根本变革:
硬件级时间同步:AC1 内部的 LiDAR、RGB 相机和 IMU 由一个共享的硬件时钟驱动。这意味着所有数据在被捕获的瞬间,就在纳秒级精度上天然对齐。这彻底根除了传统软件融合方案中,因不同传感器时钟不一、数据传输延迟抖动而产生的"非确定性延迟"问题。对于需要实时决策的机器人而言,这种确定性的低延迟是保障安全与性能的生命线。
硬件级空间同步:所有传感元件被刚性地集成在一个出厂即完成高精度标定的机身内。它们的相对位置和姿态(外参)是固定且精确已知的。这为开发者免去了繁琐且易错的手动标定环节,确保了不同数据源在空间上的完美匹配。
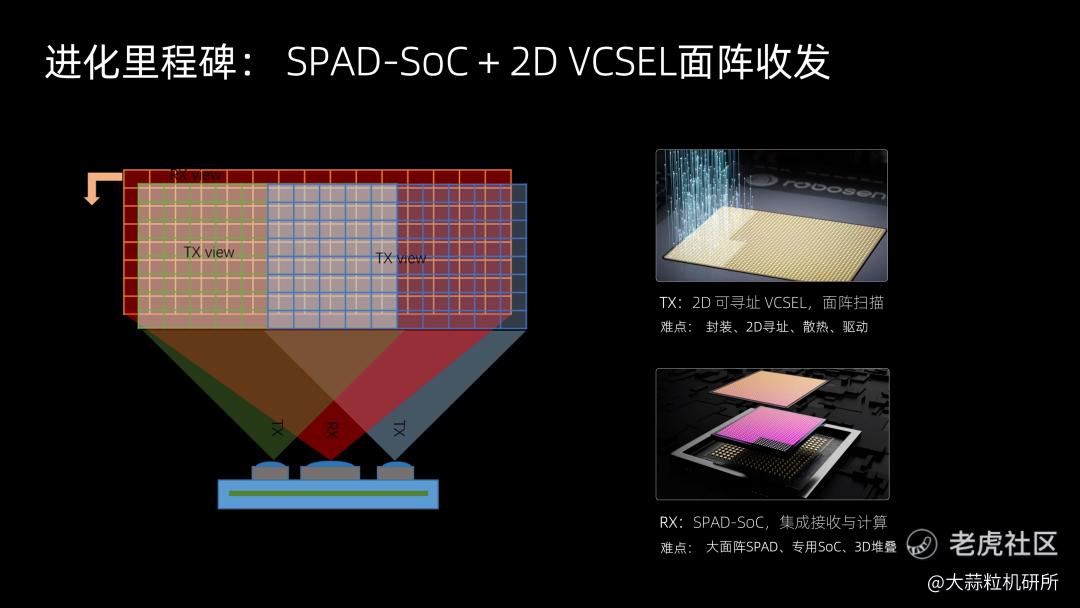
这一系列创新的背后,是速腾聚创在自研芯片和全固态架构上的深厚积累。其基于 VCSEL+SPAD 的全数字化架构,以及在车载 LiDAR 领域得到验证的自研 SPAD-SoC 芯片技术,是实现传感器小型化、高集成度和高性能的根本保障。
这种"预融合"的、信息高度浓缩的数据,对于下游的 SLAM、物体识别等 AI 算法而言,其价值和易用性,远非三个独立的、未同步的数据流可以比拟。这样的设计,使得机器人仅凭一个"器官",就能获得从导航避障、高速移动到精细操作所需的全方位、高可靠性的感知能力,从根本上实现了从"看见"到"看懂"的质变。
四、战略升级:价值链的向上迁移
这种从硬件层面解决融合问题的思路,背后是速腾聚创一次根本性的战略转向:不再追求单一传感器的极致性能,而是根据机器人应用场景的实际需求,精准定义传感器硬件组合,同时提供通用的软件平台和完整生态。
传统方案的核心问题在于性能短板和场景局限性。为了弥补单一传感器在特定环境下的不足——比如强光下的失效、远距离的精度衰减、透明物体的识别盲区,开发者往往不得不通过“堆料”来解决:更多的传感器、更复杂的算法、更繁重的计算负载。
Active Camera 平台的首款产品—— AC1 的创新之处在于,它恰恰避免了这种“堆料”逻辑。它通过硬件级融合,确保各类关键信息——色彩、深度、运动,都能稳定获取且“够用”。不追求某一项指标的绝对领先,而是追求整体感知能力的均衡和可靠。如果特定场景对某项性能有更高要求,速腾聚创还有 AC2 以及后续产品来满足客户差异化的需求。
更重要的是,VCSEL+SPAD 本质上是半导体技术。
这意味着它遵循摩尔定律的规模化优势,一旦起量,成本将急剧下降。速腾聚创正在将其在汽车激光雷达领域已实现大规模量产的经验和成本控制能力,降维应用到机器人组件上。
这标志着 Active Camera 平台的推出是一次关键的价值链上移。速腾聚创不再仅仅销售一个产生原始数据的传感器组件,而是在销售一个提供处理后信息的子系统。它将硬件底层的复杂性打包封装,从而让客户能够有效捕获系统总价值中更丰厚的部分。
五、AI-Ready 生态:最大程度解放开发者创新力
速腾聚创的远见在于,它很清楚一款好的硬件只是起点。要真正撬动整个产业,必须构建一个能够赋能开发者的强大生态系统。Active Camera 的另一大支柱—— AI-Ready 生态,正诞生于这样的初衷。
AI-Ready 生态直面当前机器人感知开发的另两大痛点:方案发散、难以量产。它的目的是将开发者从繁重的底层感知工作中彻底解放出来,让他们能将全部精力聚焦于机器人上层的应用创新和核心业务逻辑。

双重价值创造:
降低门槛,加速原型开发:AI-Ready 生态提供从驱动、SDK 到 AC Studio 一体化工具的全流程支持,兼容 ROS/ROS2 等主流机器人平台。更重要的是,它提供了开源的 SLAM、物体检测等核心算法参考,让开发者可以"开箱即用",在数小时内就完成机器人原型验证,而非数周甚至数月。

内外双循环,驱动商业落地:据速腾聚创官方公布的信息,AI-Ready 生态构建了一个"内外双循环"的价值网络。一方面,场景开发者(如越疆科技、普渡科技等)可以轻松利用平台已整合的算法能力,快速实现产品商业化。另一方面,算法开发者可以借助平台丰富的应用场景来迭代和验证其算法方案,精准地找到客户和市场。
市场用真金白银给出的投票
我们已经能看到这一策略正在奏效的迹象。
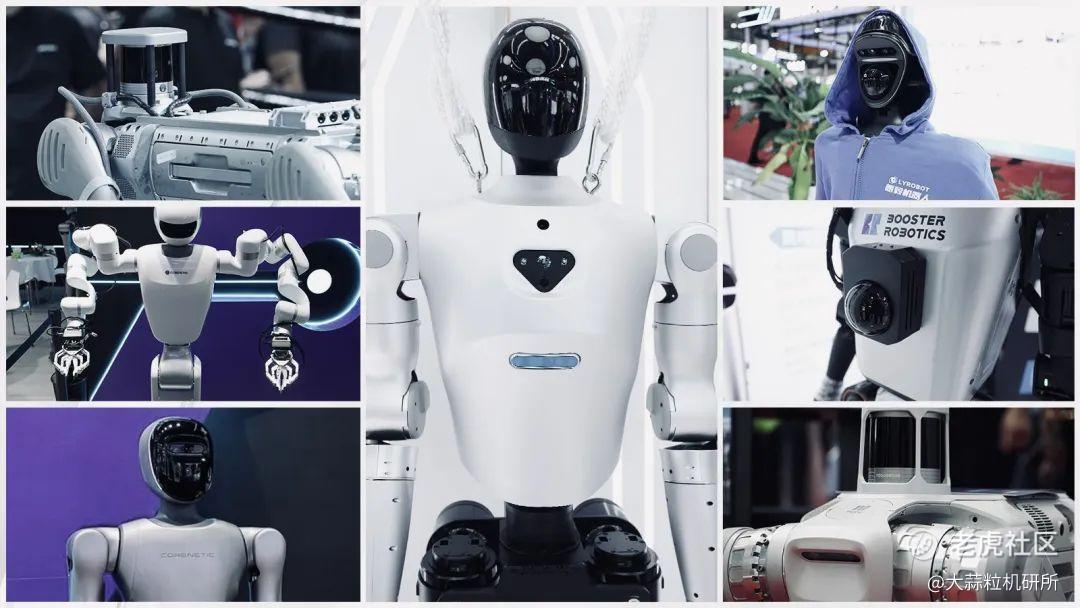
在今年的世界机器人大会 WRC 上,包括国家队级别的人形机器人创新中心,以及宇树、普渡等行业明星公司,都纷纷在其最新产品上搭载了 Active Camera。这证明,市场正在真金白银投票,逐步认可了这种"即插即用"的高性能感知方案。

继 Active Camera 平台的首款产品 AC1 在3月份发布后,该平台的全新产品 AC2 在本届 WRC 上首次亮相,计划在下半年正式发布。

六、点燃具身智能时代的火种
那么,速腾聚创的战略终局是什么?
重构竞争格局,加速产业成熟
首先,它正在试图定义一个新品类。Active Camera 的竞争对手,从来不是那些售价几百美元的深度相机。它的真正竞品,是企业内部那个为了解决感知问题而设立的、由数位工程师组成的、耗费巨额薪资和时间的"感知部门"。
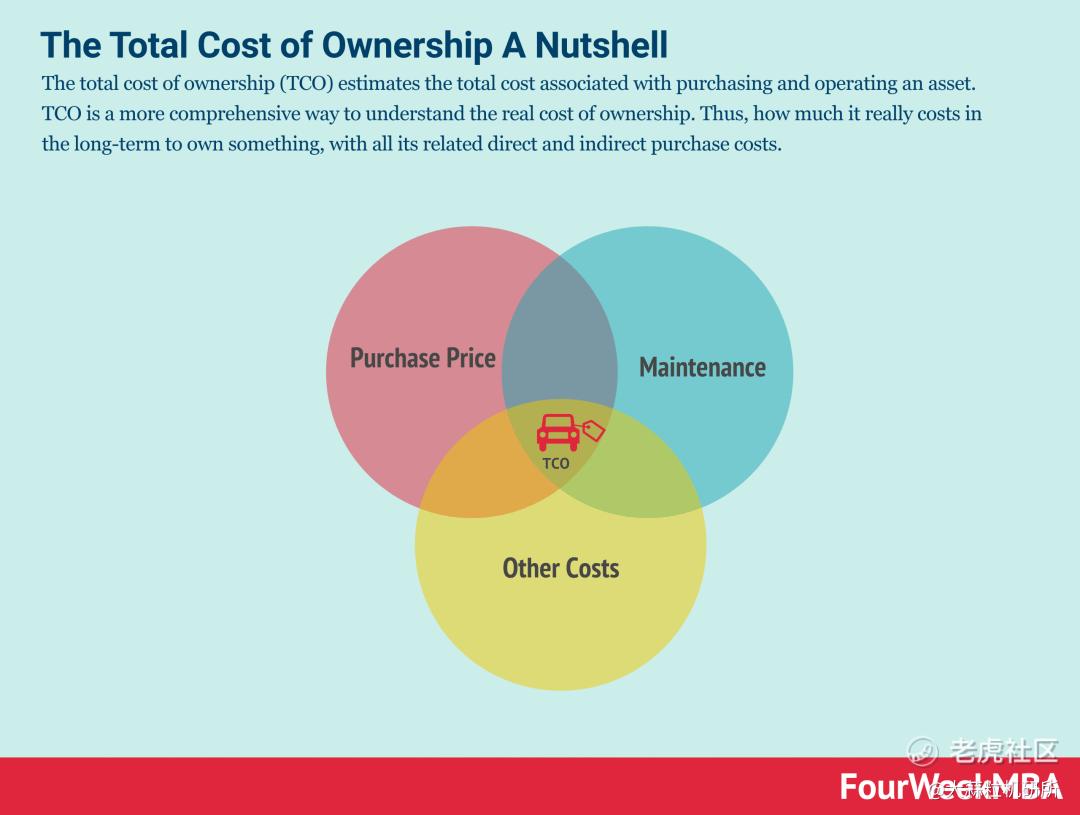
它的价值主张非常清晰:用一笔可控的硬件溢价,去替代那个在底层集成上"重复造轮子"的、无底洞般的研发投入。这是一个针对总体拥有成本(TCO)的讨论。
其次,通过标准化硬件和生态,它有望"收敛"行业内混乱的技术路线,加速产业成熟。当越来越多的开发者基于同一个平台进行创新,整个生态的价值将被指数级放大。
展望未来:感知芯片化时代
如果更大胆地畅想,"感知芯片化"(Perception-on-a-Chip)才是最令人激动的。Active Camera 的全固态、半导体架构,正是通往这一终局的关键一步。可以预见,未来的某一天,我们今天看到的这个功能强大的模块,将被集成到一颗单一、廉价的芯片上。届时,先进的 3D 感知能力能够像今天的摄像头一样无处不在,成为所有智能设备的标配。
毫无疑问,作为一个新品类的开拓者,速腾聚创面临着市场教育、开发者习惯迁移等诸多挑战。但它瞄准的是一个真实且持久的行业痛点。它卖的不仅仅是硬件,更是宝贵的时间和确定性。
通过将开发者从底层集成的繁重工作中解放出来,速腾聚创正在为整个机器人行业的基建添上最重要的一块砖。它让本应专注于顶层创新的开发者,得以站在一个更坚实的肩膀上,去构建真正智能的下一代机器人。
这,或许将成为点燃具身智能时代真正来临的那颗火种。
免责声明:上述内容仅代表发帖人个人观点,不构成本平台的任何投资建议。
